IEEE 1588 PTP and SyncE protocols keep radio units, switches, and distribution units in sync.
Deployment of 5G networks in cities around the world marks one of the largest and fastest evolutions in networking infrastructure. To inspire competition and innovation, the open radio access network, or Open RAN, is an industrywide initiative to enable interoperability among hardware suppliers. The standardization of Open RAN levels the playing field, driving lower costs with more competition while letting operators mix and match components for best performance. Network providers, and by extension consumers, will welcome decreased costs from interoperability. The growing number of components that need synchronization brought on by the densification of the network makes careful consideration of network timing functions critical.
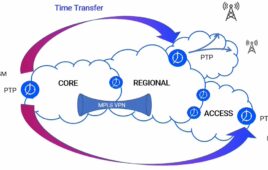
The OPEN RAN architecture consists of three major components: the remote radio unit (RU), the fronthaul switch, and the distribution unit (DU), shown in Figure 1. The RU serves as the consumer’s access point to the network. The DU acts as the connection to the centralized unit (CU) and the mobile core. Finally, the fronthaul switch routes traffic between the RU and DU. The standardized interface that transmits information between components of the radio access network is known as enhanced Common Public Radio Interface (eCPRI). These components need precise synchronization to avoid data packet loss and network interruptions.
Figure 1. The 5G Open RAN architecture is split into three base components: the RU, fronthaul switch, and DU.
Before we cover methods of synchronization, you should understand time division duplexing (TDD) and why it’s becoming the dominant form of duplexing for 5G OPEN RAN. Unlike frequency division duplexing (FDD), TDD separates outbound and inbound signals by transmission time slots, not separate frequencies. TDD offers more flexibility as the ratio of outbound to inbound transmission can be adjusted based on the demand at any one time, resulting in a more efficient use of the channel. This flexibility is necessary in 5G Open RAN as upload and download demand change constantly. Because TDD depends on an understanding of timing, the network uses IEEE 1588 Precision Timing Protocol (PTP) to synchronize transmitted and received signals. While time-based synchronization is becoming more common in the network, frequency-based synchronous Ethernet (SyncE) remains an underlying technology critical to system synchronization. Additionally, both PTP and SyncE are robust alternatives to GPS synchronization. While accurate, GPS reference timing can be affected by poor weather and is vulnerable to jamming or spoofing. Depending on the network architecture, Open RAN networks can use PTP, SyncE, or both for synchronization.
Not only is PTP critical because it’s the gateway to nanosecond time error, it’s also an intelligent system that can adapt to the loss of a grandmaster and can selectively reassign the “highest ranking” timing packet. The growing amount of data passing through the network at faster speeds makes the advantages of PTP synchronization crucial for a reliable Open RAN. Therefore, oscillators and jitter cleaners that enable the highest performance from the IEEE 1588 protocol are just as crucial.
Of the three main components in the Open RAN architecture (Figure 2), the RU has the least stringent timing requirements, but it must be the most environmentally robust. RUs are often installed in dense, uncontrolled environments and must remain precisely synchronized to the rest of the network while subjected to heat, airflow, and vibration. The densification of radios in 5G Open RAN requires them to be placed in environmentally unforgiving locations: on rooftops, poles, and near roads and highways. RUs generally require the timing of high-performance temperature-compensated oscillators (TCXO) or MEMS oscillators. Similar in architecture to the RU, the fronthaul switch uses a reference oscillator and jitter cleaner to clock an FPGA accelerator, which also performs the IEEE 1588 processing.
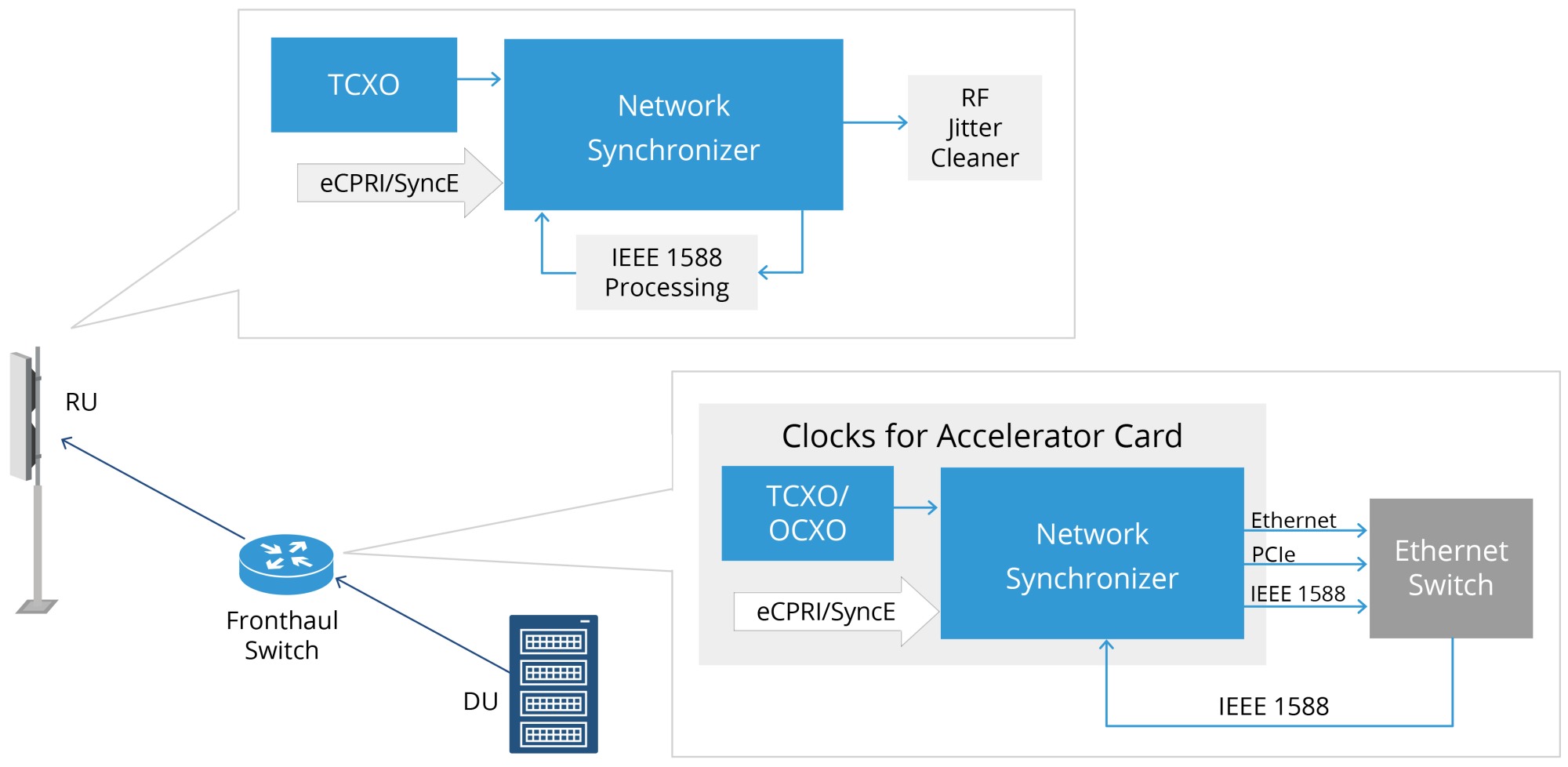
Figure 2. TCXOs, OCXOs, MEMS oscillators, and network synchronizers compose the clock tree for RU and DU systems.
Which timing source?
Only the most precise TCXOs available today can maintain the performance required by the RU and fronthaul switch under environmental stresses. Frequency slope is one of the most critical oscillator parameters for Open RAN. This specification describes how the frequency will behave as ambient temperature changes. Any sudden changes in frequency can correlate to a high frequency slope. In applications dependent on PTP, having a low frequency-over-temperature slope, usually considered ±1 ppb/°C or less (Figure 3), lets the TCXO maintain an accurate reference between timing packets, even under fast temperature ramp. This enables a longer loop bandwidth, giving the IEEE 1588 algorithm more time to choose the packet from the highest-ranking clock available.
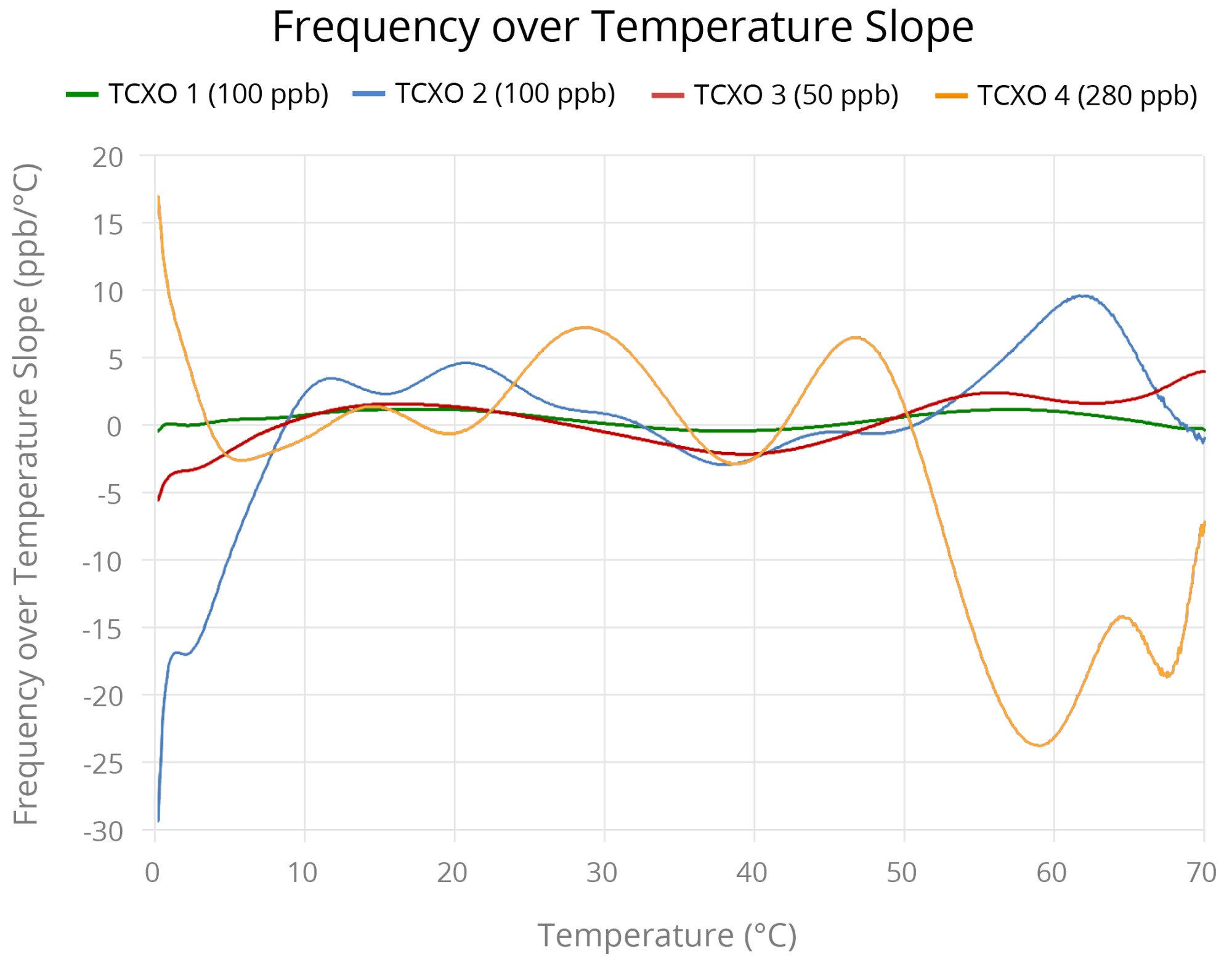
Figure 3. The frequency over temperature slope of a TCXO is a critical factor in Open RAN timing and independent of the frequency stability.
The component of the 5G Open RAN with the most demanding timing specification is the DU (Figure 4), usually requiring an oven controlled oscillator (OCXO) for added stability. As the gateway to the network core, it must maintain a precisely synchronized time reference which it passes down to the fronthaul switch and RU. In some networks, the fronthaul switch will also require an OCXO.
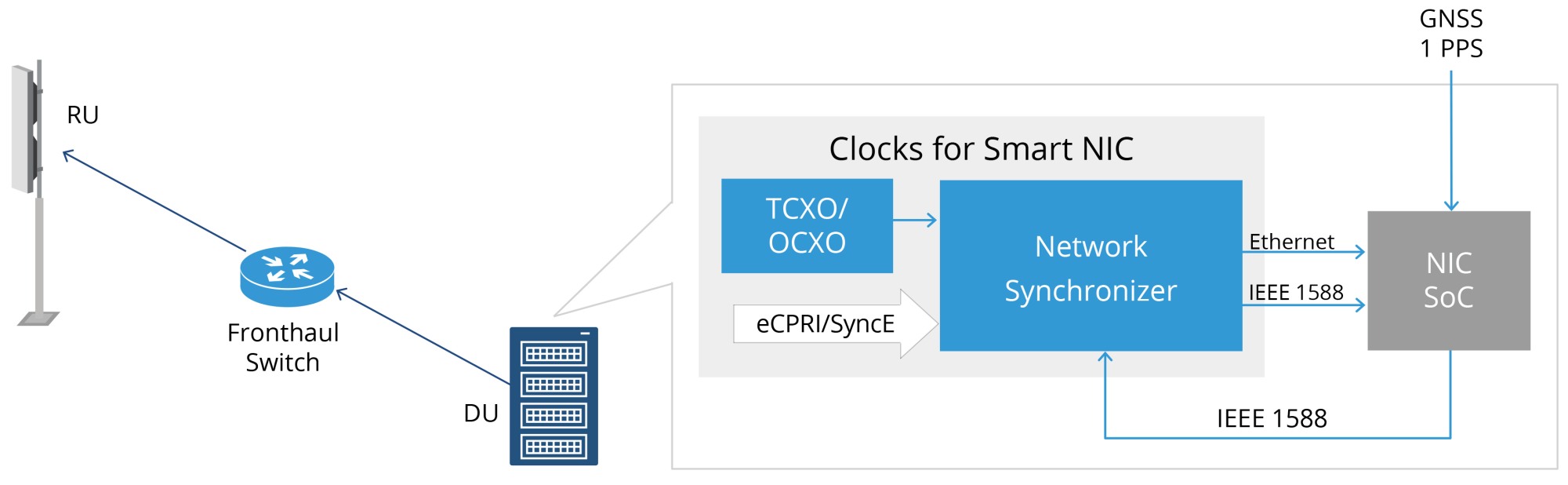
Figure 4. The DU server usually requires the added stability of an OCXO to maintain accurate timing even without a reference clock.
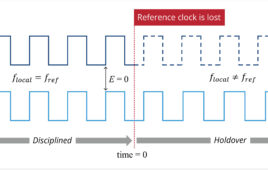
In Open RAN systems, the need for an OCXO over a TCXO is generally driven by a time holdover requirement, which defines how long it can “free run” without a reference before accumulating a certain time error. If all timing references are lost, the DU must maintain an accurate output clock until connection to the reference is restored. Most DUs currently being designed will support four to six hours, and in some cases up to 12 hours of holdover before exceeding a 1.5 µsec time error. Increasing time holdover in the DU improves reliability across the system because accurate time pass down to the fronthaul switch and RU even when connection to the reference time is interrupted.
Stability counts
In addition to providing sufficient time holdover, the OCXO must remain stable under environmental stressors such as airflow and rapid temperature change. An OCXO must retain its accuracy even when placed near a fan or when the SoC emits heat under heavy load. Additionally, the push to minimize latency through edge computing is leading to more DUs being placed at the tower where they are exposed to similar stressors. Allan deviation (ADEV), a measure of oscillator stability in the time domain, is an important parameter for OXCOs used within Open RAN.
Figure 5 demonstrates the difference in ADEV performance under airflow between high quality and low quality TCXOs. When the devices are subjected to airflow, the TCXO 1 has 38 times better ADEV at a 3 sec averaging time. A similar difference can be seen when comparing high and low quality OCXOs as well. When operating in a pole mounted RU or in a DU next to a fan, time error due to poor ADEV can cause delays in PTP packets and ultimately lead to data errors and loss of synchronization.
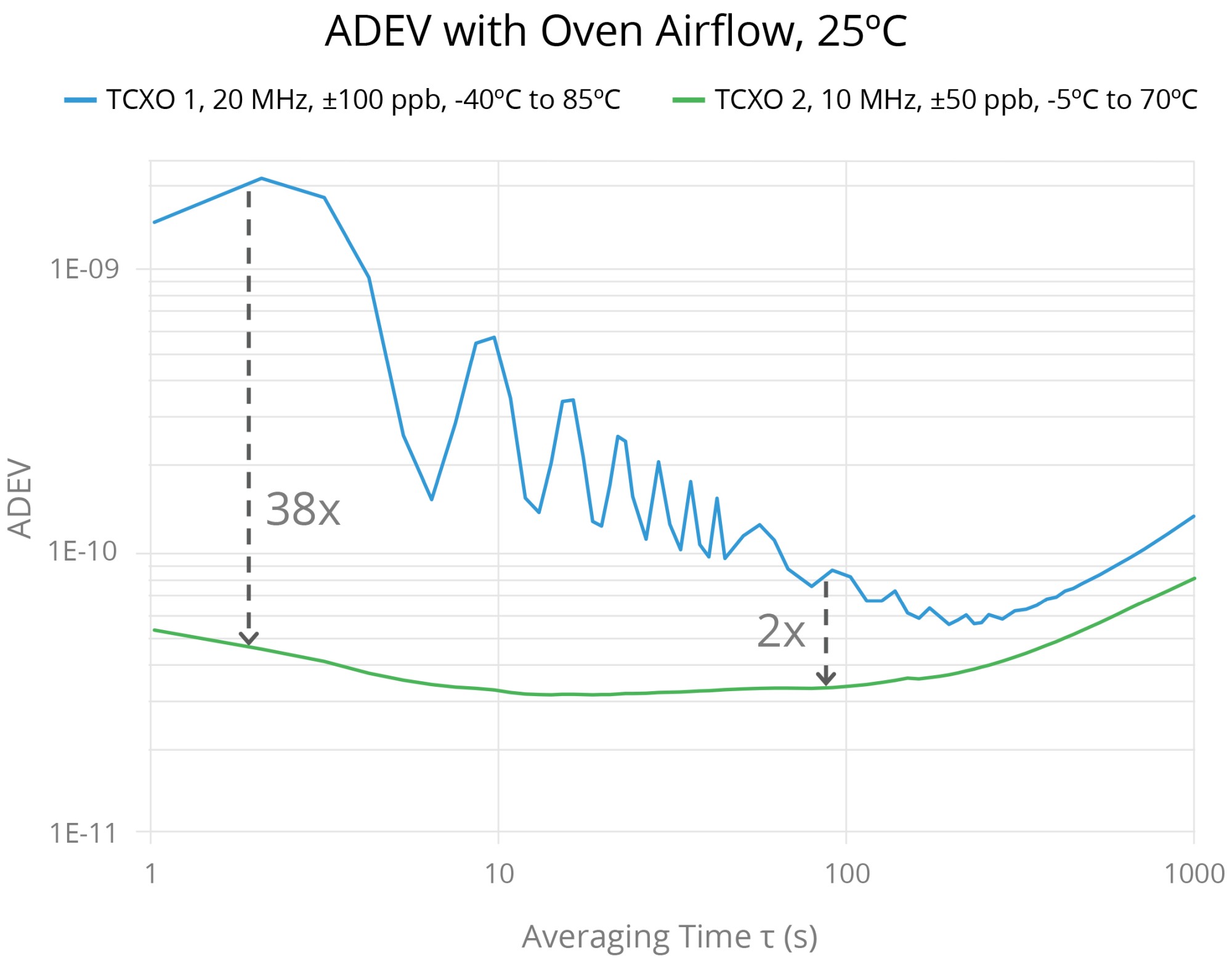
Figure 5. Two similarly specified TCXOs have dramatically different ADEV under airflow.
While environmental resilience is needed to get the most out of a PTP synchronized system, PTP can be combined with SyncE for the best overall performance. To regulate these incoming timing references and operate the IEEE 1588 loop, an advanced type of PLL called a network synchronizer is needed. The ITU Telecommunication Standardization Sector (ITU-T) has defined the maximum time deviation (TDEV) allowable for SyncE and for best system performance, it is crucial to ensure the total TDEV is below this mask with considerable margin (Figure 6).
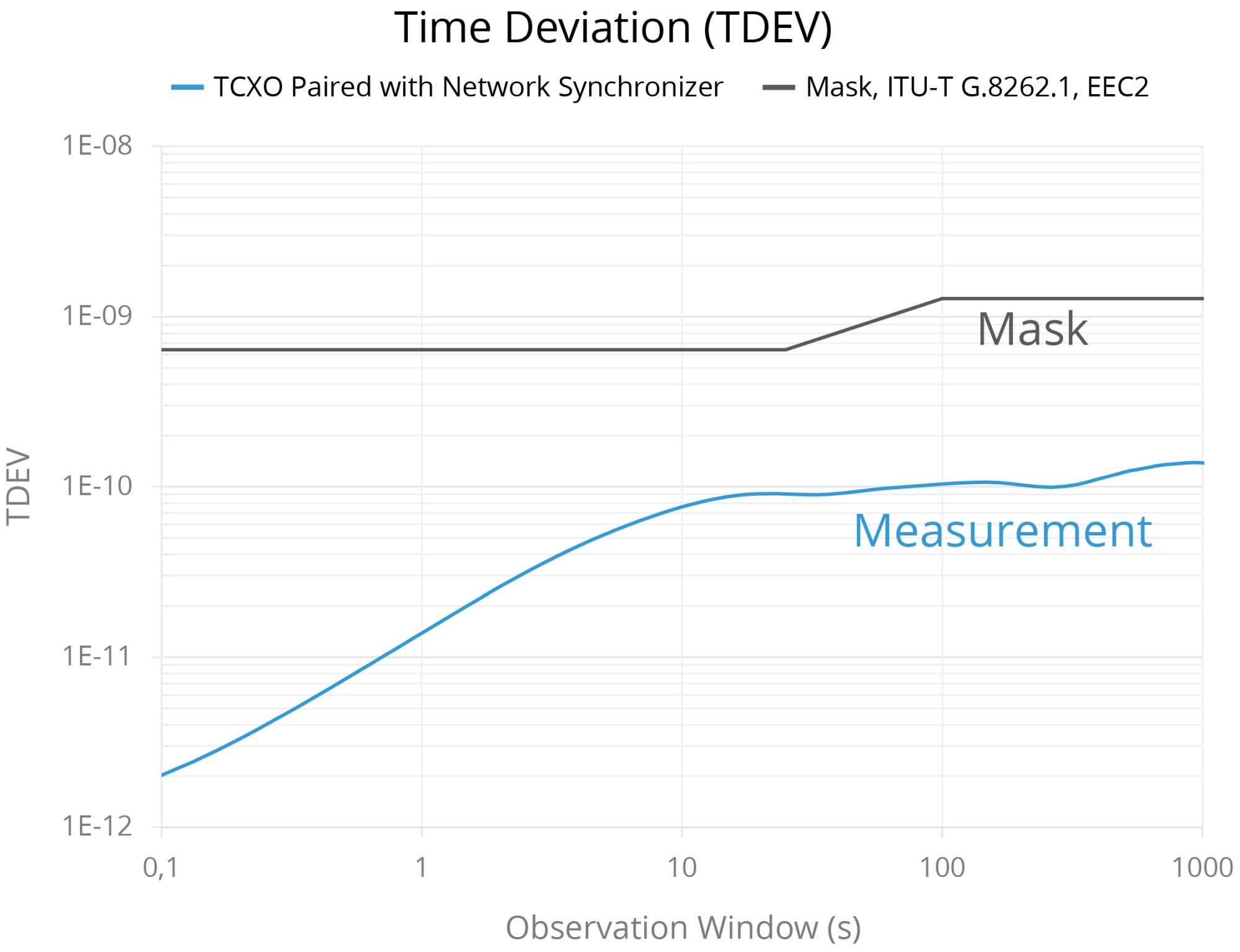
Figure 6. System architects must ensure the combination of the TCXO and network synchronizer doesn’t exceed the SyncE TDEV mask.
Both IEEE 1588 PTP and SyncE are cornerstones of 5G OPEN RAN and using them together is essential to achieve the best system performance. As RUs are subjected to harsh outdoor conditions, better dynamic performance of the TCXO and OCXO under fluctuating temperature and airflow leads to less disruptions and service outages. The oscillators frequency over temperature slope must also be considered as lower a slope directly translates to more accurate PTP time stamps. Finally, network synchronizers are instrumental in managing the reference inputs, generating an array or clock outputs for various system, and functions facilitating the IEEE 1588 loop.
 Jeff Gao, Senior Director of Product Marketing at SiTime, has over 20 years of experience in the semiconductor and networking/communications industries in wireless systems, VoIP, biometrics, semiconductor timing, and embedded software. Prior to SiTime, Jeff held various product marketing and engineering positions of increasing responsibility with Atmel, Cisco, Vovida Networks and ArrayComm. His current technical interests include high precision timing and synchronization in 5G, data center, optical transports, and next-gen industrial applications. Jeff earned his MBA from the University of California, Berkeley and MSEE from the University of Wisconsin–Madison.
Jeff Gao, Senior Director of Product Marketing at SiTime, has over 20 years of experience in the semiconductor and networking/communications industries in wireless systems, VoIP, biometrics, semiconductor timing, and embedded software. Prior to SiTime, Jeff held various product marketing and engineering positions of increasing responsibility with Atmel, Cisco, Vovida Networks and ArrayComm. His current technical interests include high precision timing and synchronization in 5G, data center, optical transports, and next-gen industrial applications. Jeff earned his MBA from the University of California, Berkeley and MSEE from the University of Wisconsin–Madison.

Tell Us What You Think!